Research Projects at UC Computer Vision




Past Projects


PhD Theses


Deep Learning Architectures for Precision Tree Branch Cutpoint Detection (2022 -)
Bradley Scott 2022
Work in Progress.


Autonomous identification and sizing of scallops in situ (NIWA)(2019-)
Tim Rensen 2019 –
Work in Progress.

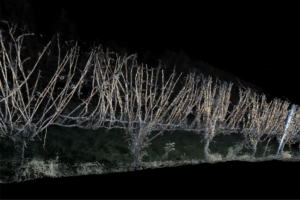
Dense 3D reconstruction of high frequency structures in the vineyard. (2019-2025)
Casey Peat 2019 – 2025
Work in Progress.

Audio Visual Interactions with Invasive Predators for Autonomous Luring (Predator Free 2050 led) (2021- 2025)
Ben McEwen 2021 – 2025




Towards accurate earth-referenced LiDAR mapping with an autonomous mobile robot (2017-2019)
Matthew Young 2017-2019
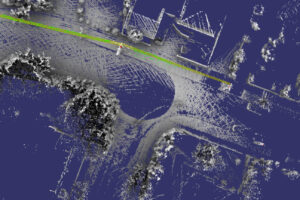
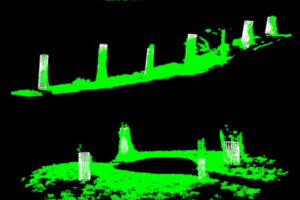
Reconstruction of overhead electrical infrastructure for dynamic line rating using vehicle-mounted LiDAR (2014-2018)
Josh McCulloch 2014-2018


Asymptotically optimal path planning with integrated local optimisation for robotic vine pruning (2013-2016)
Scott Paulin 2013-2016

Statistical methods for correspondence problems with branched structures (2012-2015)
Davide Floriello 2012-2015
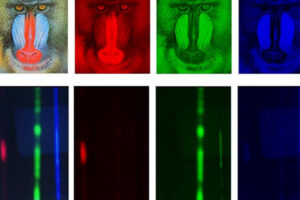
Image histogram features for nano-scale particle detection and classification (2008-2014)
Kapila Pahalawatta 2008-2014

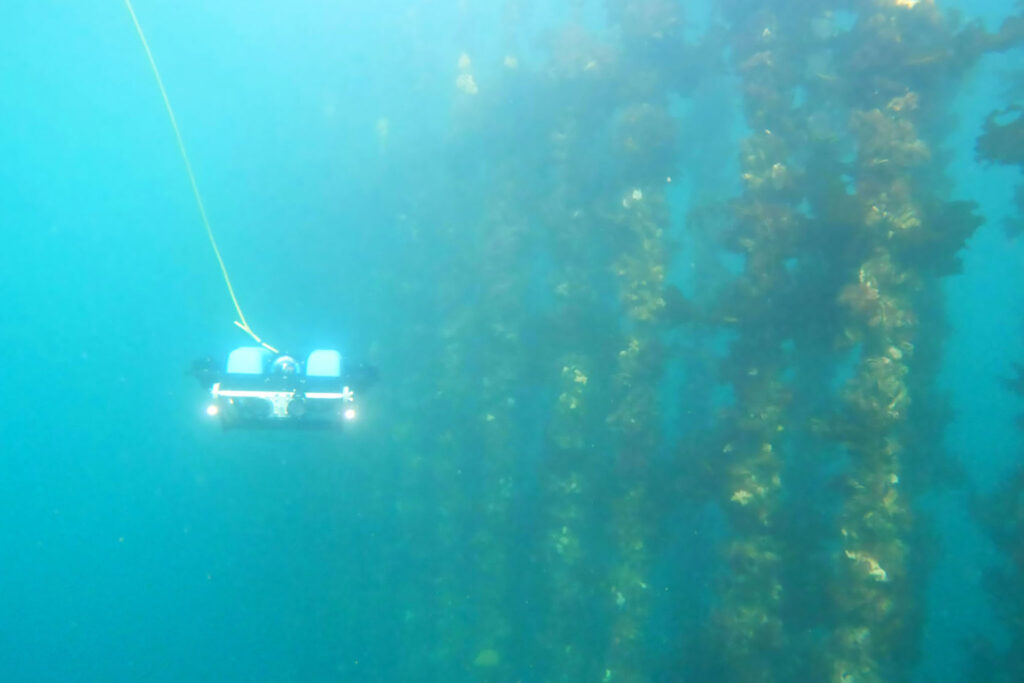
Accurate high-resolution 3D surface reconstruction and localisation using a wide-angle flat port underwater stereo camera: towards autonomous ship hull inspection (2009-2014)
Robert Schattschneider 2009-2014


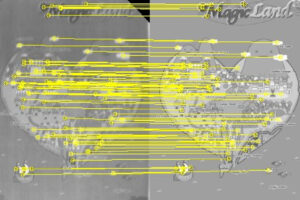
Visual Navigation for mobile robots using the Bag-of-Words algorithm (2007-2010)
Tom Botterill 2007-2010
Adrian Clark 2005-2010

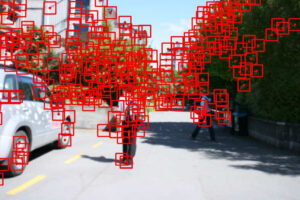
Real Time Human Tracking in Unconstrained Environments (2005-2010)
Hongzhi Gao 2005-2010

Signal-linear representations of colour for computer vision (2005-2010)
Robert Grant 2005-2010

Texture-boundary detection in real-time (2006-2010)
Ray Hidayat 2006-2010
Multimodal Speech-Gesture Interaction with 3D Objects in Augmented Reality Environments (2006-2010)
Minkyung Lee 2006-2010
Masters Theses





Robotic arm path planning for automatic grape vine pruning
Andrew de Wet 2023-2024

Real-time sensor fusion (GNSS IMU) aided single view geometry camera calibration
Dylan White 2022-2024

Weddell seal monitoring in McMurdo Sound, Antarctica: a novel approach (2020-2021)
Shanelle Dyer 2020-2021
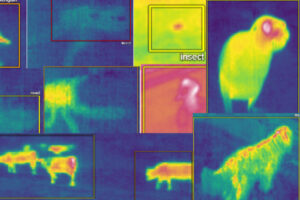
Species classification on thermal video using a convolutional recurrent neural network. (2019-2021)
Chris Carr 2019-2021
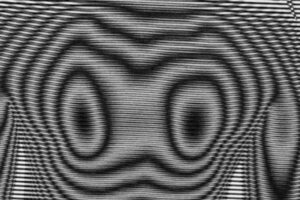
Long range moiré patterns (2019-2021)
Sam Banks 2019-2021

Novel CNNs for target localisation to prune pine tree branches : tree pruning with a smart UAV. (2017-2018)
Tim Irving, S, 2017-2018
Tree position detection for autonomous UAV navigation (2016-2017)
Scott (Peiwen) Luo 2016-2017

Development Of A Real-Time Pedestrian Localisation System For A Warehouse Environment (2015-2016)
Ryan Estep 2015-2016

An unmanned aerial vehicle for autonomous forestry cutover edge survey (2015-2016)
David Hunt 2015-2016
Real-Time Hybrid Tracking for Outdoor Augmented Reality (2011-2013)
Samuel Williams 2011-2013

Feature Recognition and Obstacle Detection for Drive Assistance in Indoor Environments
Brenda (Chunhui) Zheng 2009-2012

Robust Upper Body Pose Recognition in Unconstrained Environments using Haar-Disparity (2007-2008)
Chu, H. S. 2007-2008

Plant species biometric using feature hierarchies (2007-2008)
Kapila Pahalawatta 2007-2008
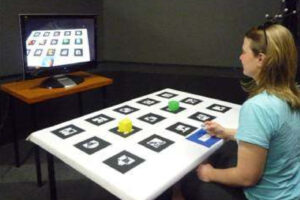
Large-Scale Display Interaction Techniques to Support Face-to-Face collaboration (2004-2006)
David Thompson 2004-2006
Novel algorithms for tracking small and fast objects in low quality images. (2004-2005)
Hongzhi Gao 2004-2005
BE Hons
Honours (BSc, BE) Projects
- Andrew Clifford 2021 Onboard Automated Collision Avoidance for Drones using RGBD Video
- Yu Duan 2021 Whale Geometry: Estimate the Size of Free-living Whales
- Jerome Grubb 2021 Forest restoration and forecasting
- Phillip Kim 2021 Improving the reliability and ease of bloodstain pattern analysis with quantitative techniques
- Laurence McKnight 2021 Improving the reliability and ease of bloodstain pattern analysis with quantitative techniques
- Hamish O’Keeffe 2021 Research projects in Aquaculture Technology
- David Turton 2021 Forest restoration and forecasting
- Manoj Paladugu 2020 Protecting our borders from biosecurity threats: Six-sided container scanning to identify threats
- Joel Ridden 2020 Protecting our borders from biosecurity threats: Six-sided container scanning to identify threats
- Michael Shannon 2020 Protecting our borders from biosecurity threats: Six-sided container scanning to identify threats
- Aaron Smith 2020 Protecting our borders from biosecurity threats: Six-sided container scanning to identify threats
- Gavin Ong 2020 Autonomous Carts
- Priyesh Shah 2020 Autonomous Carts
- Max Andrew 2020 Orchard and Vineyard robotic scanning platform
- Vikas Shenoy 2020 Orchard and Vineyard robotic scanning platform
- Kevin Langbroek 2020 Orchard and Vineyard robotic scanning platform
- George Khella 2020
- Tim Chang 2020
- Campbell Mercer-Butcher 2020
- Marvin Goesmann 2020
- Alan Brook 2019 South Pacific Sera Ltd Visit Wilding Pines with a Drone
- Alex Tompkins 2019 ESR Automated Method for Single Bloodstain Measurement
- Jack Hay 2019 South Pacific Sera Ltd Visit Wilding Pines with a Drone
- James Morritt 2019 South Pacific Sera Ltd Visit Wilding Pines with a Drone
- Lachlan Brewster 2019 South Pacific Sera Ltd Visit Wilding Pines with a Drone
- David Lee 2018 Collecting Forest Metrics using UAV Photogrammetry
- Sam Bates 2018 Collecting Forest Metrics using UAV Photogrammetry
- Sam Beeston 2018 Collecting Forest Metrics using UAV Photogrammetry
- William Muir 2018 Collecting Forest Metrics using UAV Photogrammetry
- Dale Baker 2017 Detecting Branches In Depth Images Generated By An R200 Camera
- Josh Nimmo 2017 Pedestrian Detection and Collision Avoidance
- Zac Todd 2017
- Bradley Kirwan 2016 Multi-hop ad hoc communication over WiFi in a UAV Swarm
- Haydon Baddock 2016 Wheelchair Data Logger
- James Harrison 2016 UAV Swarm: Localisation within a known indoor environment utilising fiducial markers
- Jay Harris 2016
- Josh Norton 2016
- Sam Schofield 2016 UAV Swarm: Autonomous Environment Mapping
- Su-Shing Chen 2016 Collision Avoidance with UAV Swarms
- Stephenson M, 2015
- Klopper J, 2013
- McCulloch J, 2013
- Watson R, 2013
- Flowers S, 2012
- Rasmus E, 2012
- Gittoes W, 2011
- Baguley G, 2009
- Eliot M, 2007
- Kelly B, 2006
- Sarjeant S, 2006
- Schoo M, 2006
- Highet R, 2004
- Vaghani K, 2004