Our UC Computer Vision group has developed a successful autonomous underwater vehicle (AUV) which automatically scans mussel farms while collecting mussel samples – to support our current mussel farm industry – and to also enable a future for economically farming thousands of hectares of mussel farms up to 10Km offshore. Visit UWAI Robotics for more information on this project.
Autonomous Underwater Scanner
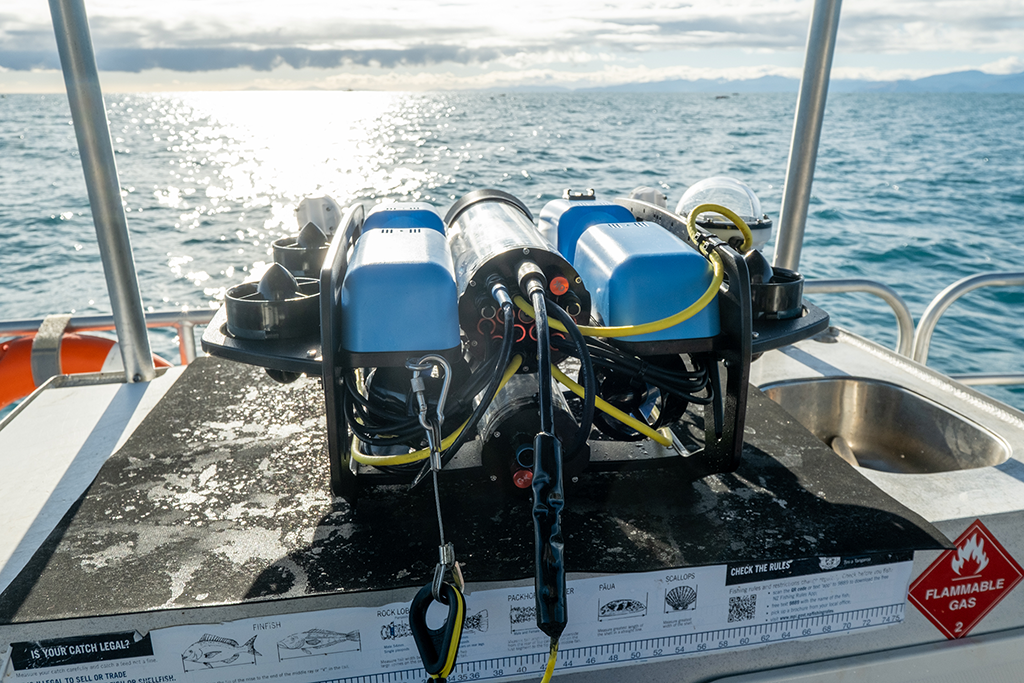
An autonomous underwater vehicle (AUV) for surveying
At the University of Canterbury, we have developed an autonomous underwater vehicle that can be easily operated by novice users to remotely inspect underwater structures to enable surveys, inspections and use manipulation tools and sensors without human assistance. This can now do rapid 3D colour scanning/recognition of underwater surfaces / objects / organisms to sub-mm accuracy using novel AI approaches to automatically ‘scan’ for crop health, condition, biofouling, or conditions of underwater structures.
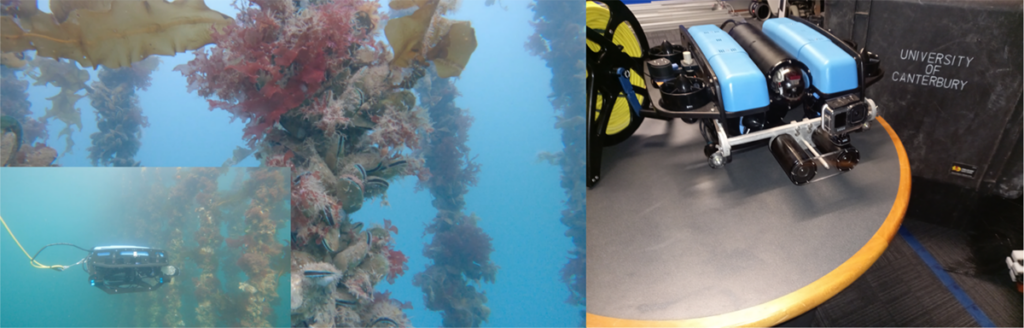
So far, we have used this AUV for mussel farm surveying to estimating crop size/health, salmon net surveying to scan for holes in nets and wharf pylon surveying for biosecurity inspections.



Following is a video of an ROV autonomously scanning mussel ropes:
Our approach is unique in that we have developed an advanced AUV simulator which enables rapid prototyping of novel navigation, inspection patterns and AI-based image recognition. This software-in-the-loop code runs line-for-line in both the simulator and underwater drone. This, together with our extensive experience in AI and developing AUVs, gives us a significant advantage, not only in NZ, but internationally.
Collectively we will have all the necessary capability in sensing / integration, marine engineering, AUV design, control systems, 3D vision analysis, AI (especially deep learning expertise), autonomous software, and field deployment to enable rapid prototyping and development of novel applications.
We now have the capability to scan thousands of hectares of mussel farms up to 10Km offshore to enable the economic viability of such future aquaculture farming.
Mussel Sampling
In addition to our scanning and data collection, we now have the ability to collect mussels using the underwater ROV and a gripper which is attached to the robot. Sampling with our underwater ROV saves time and the need for divers to enter the water.
Our Project in the Media
To read more about our project in the media, check out these links:
AI robotics researcher taps into mussel industry – Inside Government NZ